
Если в любой момент времени  положение движущейся точки
положение движущейся точки  определяется ее радиусом-вектором
определяется ее радиусом-вектором  , то
, то  есть вектор скорости,
есть вектор скорости,  есть вектор ускорения, а годограф вектора
есть вектор ускорения, а годограф вектора  есть траектория движения точки .
есть траектория движения точки .
Вектор скорости направлен по касательной к траектории, а его модуль равен производной от пути по времени  .
.
Пример 1. Зная уравнение движения точки, определить (назвать), какую линию представляет ее траектория и найти скорость и ускорение этой точки:
1)  2)
2) 
3) 
4)  .
.
Решение. 1) Траектория точки есть годограф ее радиуса-вектора  , т. е. линия, определяемая параметрическими уравнениями
, т. е. линия, определяемая параметрическими уравнениями  . Исключая из них параметр (время) , получим прямую
. Исключая из них параметр (время) , получим прямую  , расположенную в плоскости
, расположенную в плоскости  .
.
Скорость  и ускорение
и ускорение  движения точки найдем как первую и вторую производные от
движения точки найдем как первую и вторую производные от  по :
по :

Следовательно, точка движется прямолинейно с постоянной скоростью, модуль которой

2) Здесь траектория точки есть эллипс, определяемый параметрическими уравнениями
 или уравнением
или уравнением  , который расположен в плоскости
, который расположен в плоскости  .
.Скорость точки
 ускорение
ускорение 
3) Параметрические уравнения траектории точки
 после исключения параметра преобразуются в канонические уравнения прямой
после исключения параметра преобразуются в канонические уравнения прямой 
Скорость точки
 ускорение
ускорение  - постоянно (не зависит от времени ).
- постоянно (не зависит от времени ).Здесь движение точки является прямолинейным и равномерно-переменным.
4) Траектория точки есть цилиндрическая винтовая линия

Скорость точки

ускорение

Здесь движение точки является равномерным, так как модуль скорости
 остается неизменным.
остается неизменным.Пример 2. Зная уравнение движения точки
 построить ее траекторию и векторы скорости и ускорения в моменты времени
построить ее траекторию и векторы скорости и ускорения в моменты времени  и
и  .
.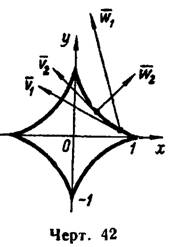
Решение. Траектория точки или годограф вектора
есть астроида 
В любой момент времени
скорость точки  , а ее ускорение
, а ее ускорение 
В момент

В момент

Траектория точки и найденные векторы ее скорости и ускорения в моменты
и построены на черт. 42.
. Практикум по математическому анализу. Урок 103")
. Практикум по математическому анализу. Урок 102")


. Практикум по математическому анализу. Урок 99")